-
LABOR - ROBOBLOK - 2017
-
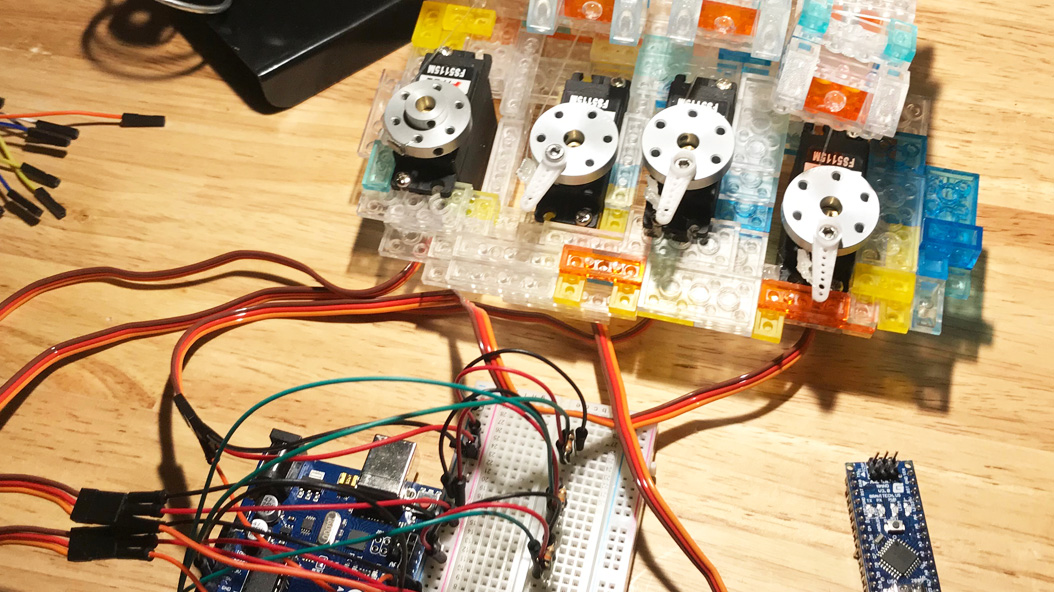
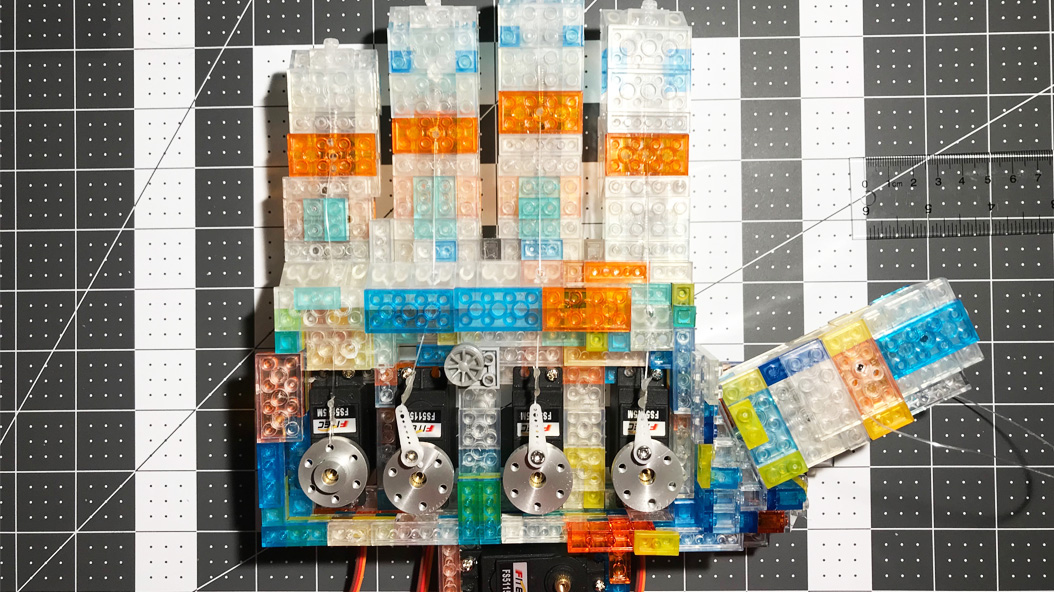
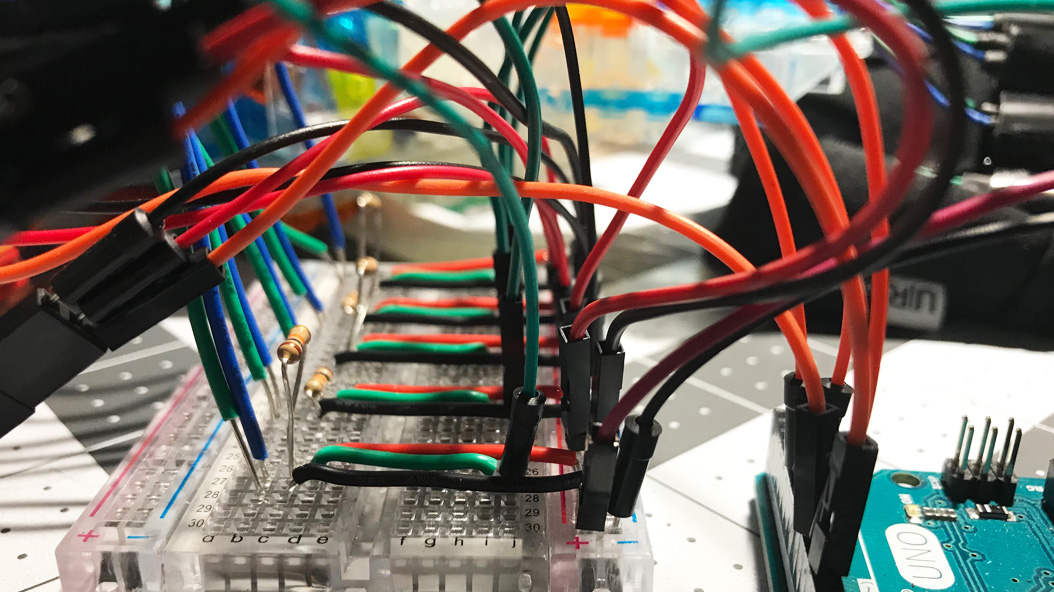
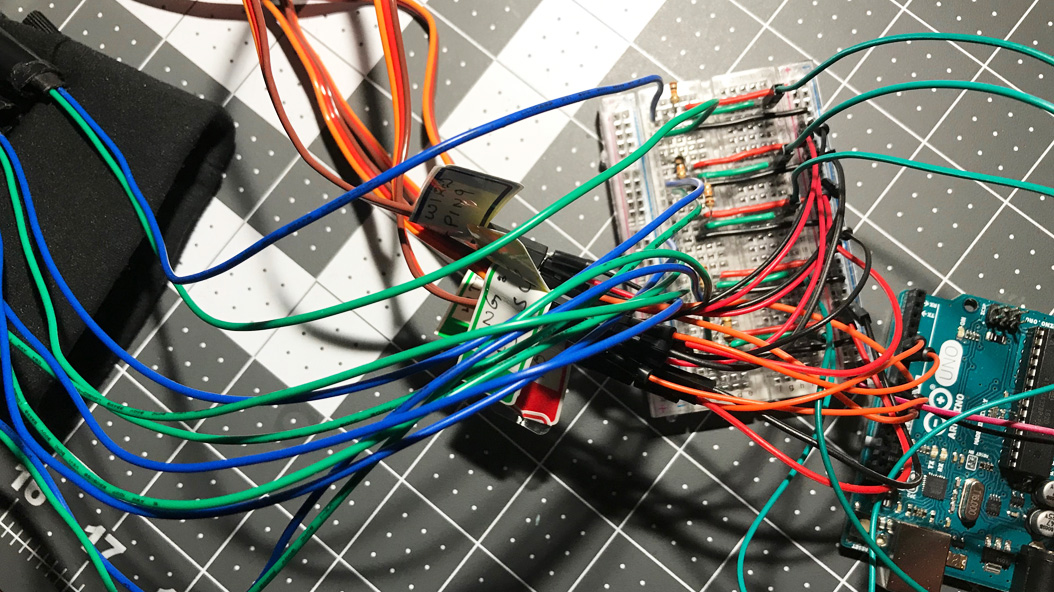
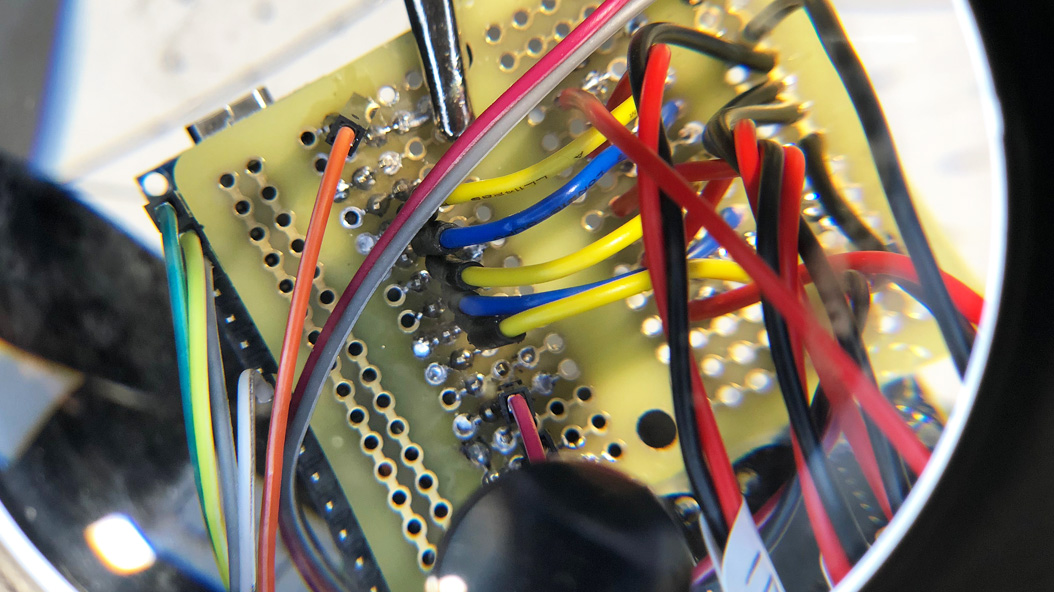
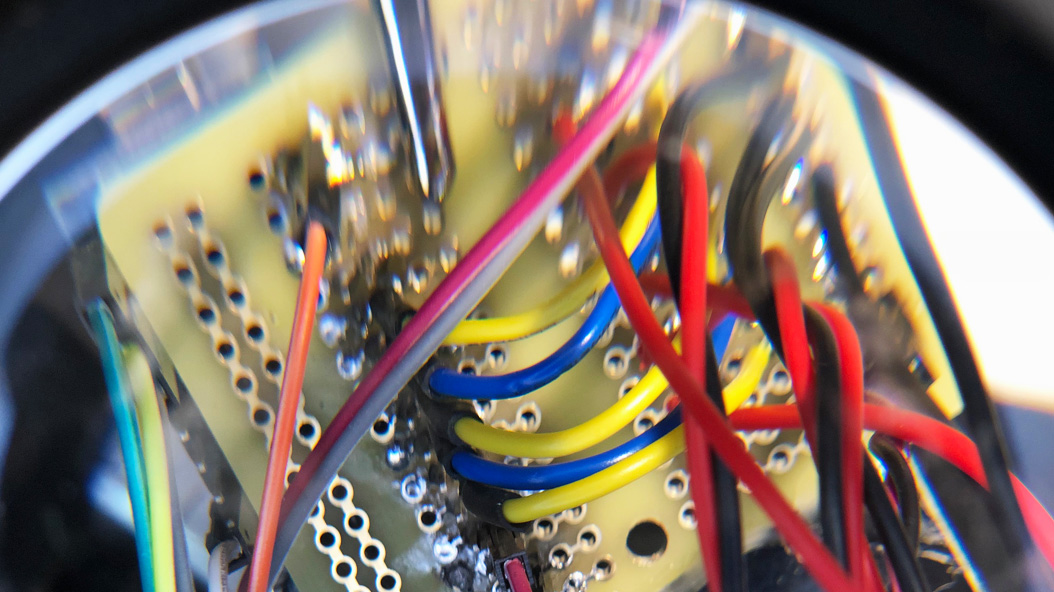
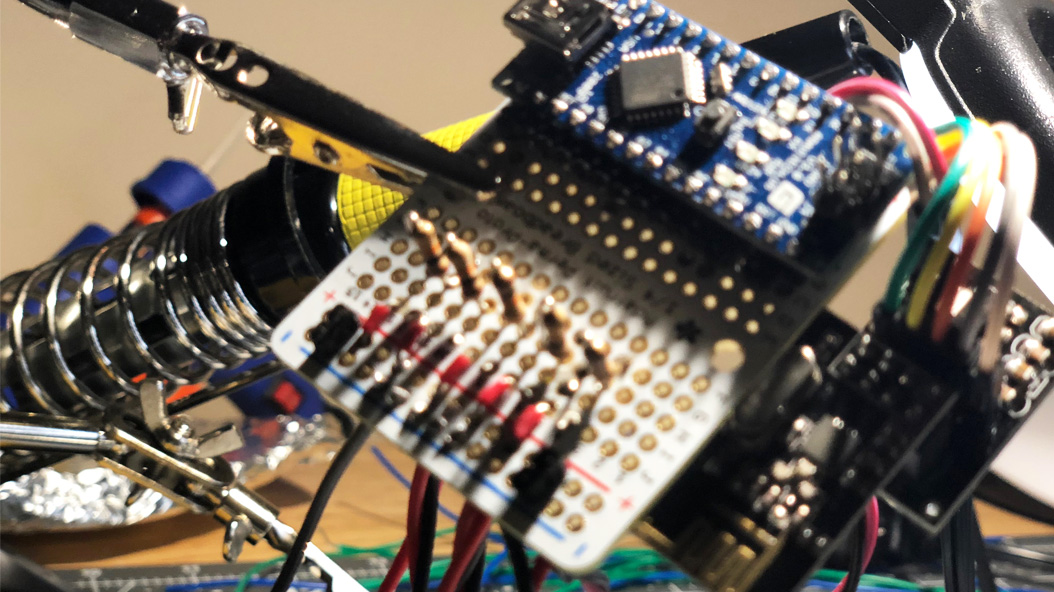
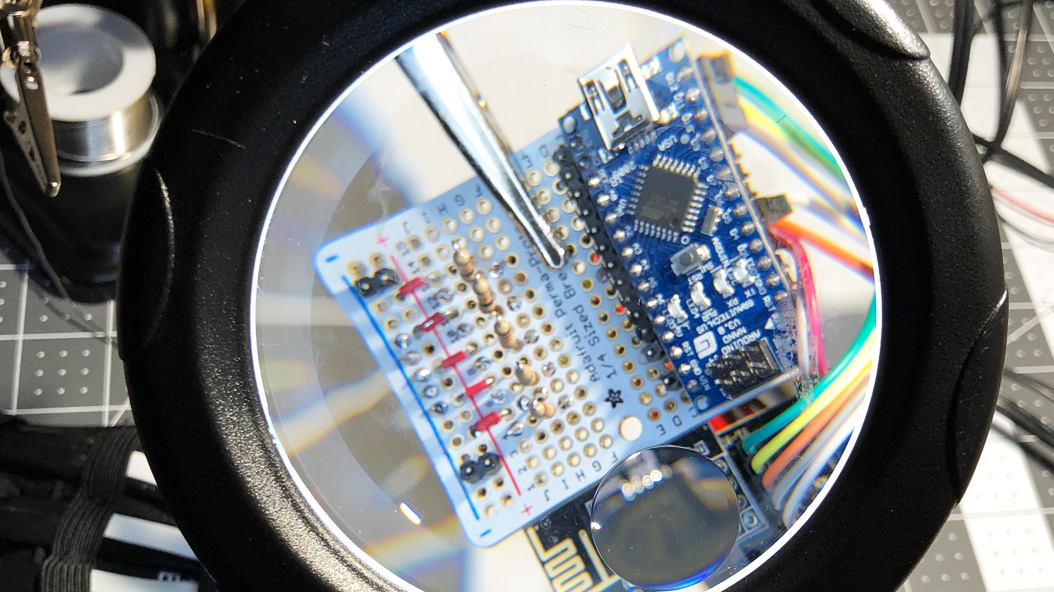
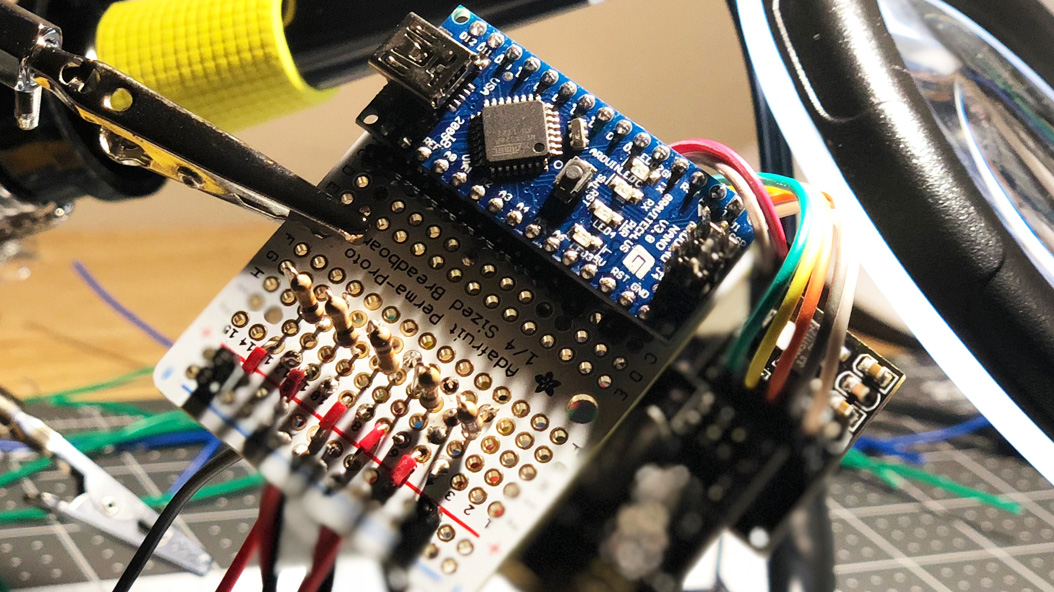
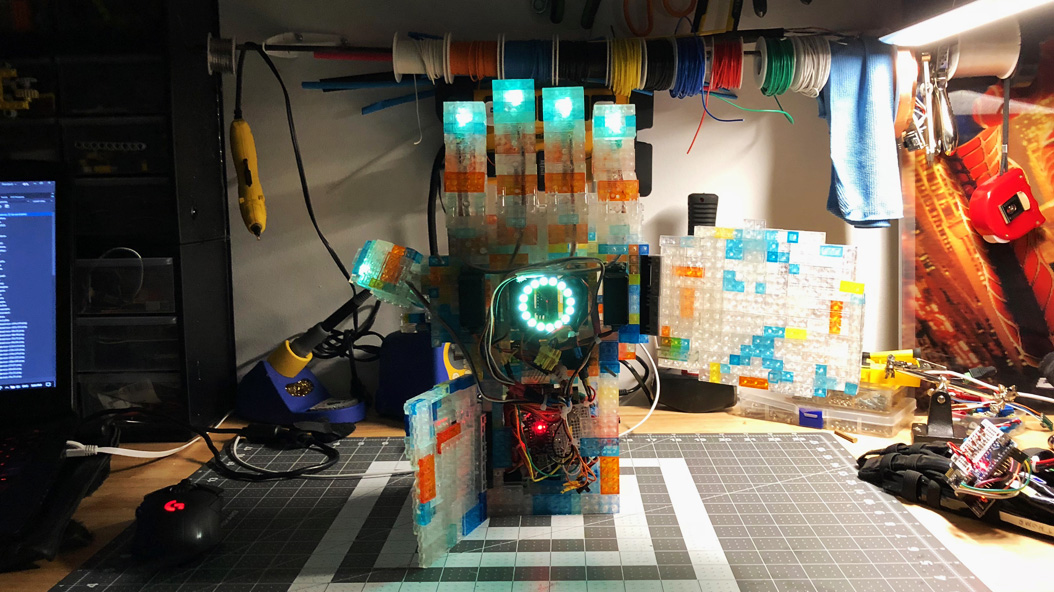
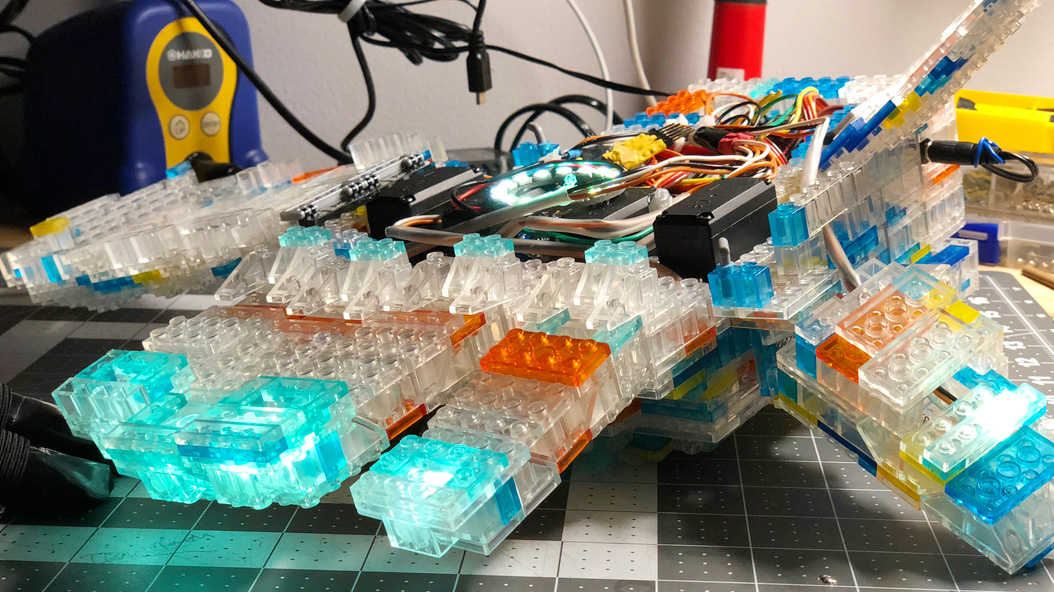
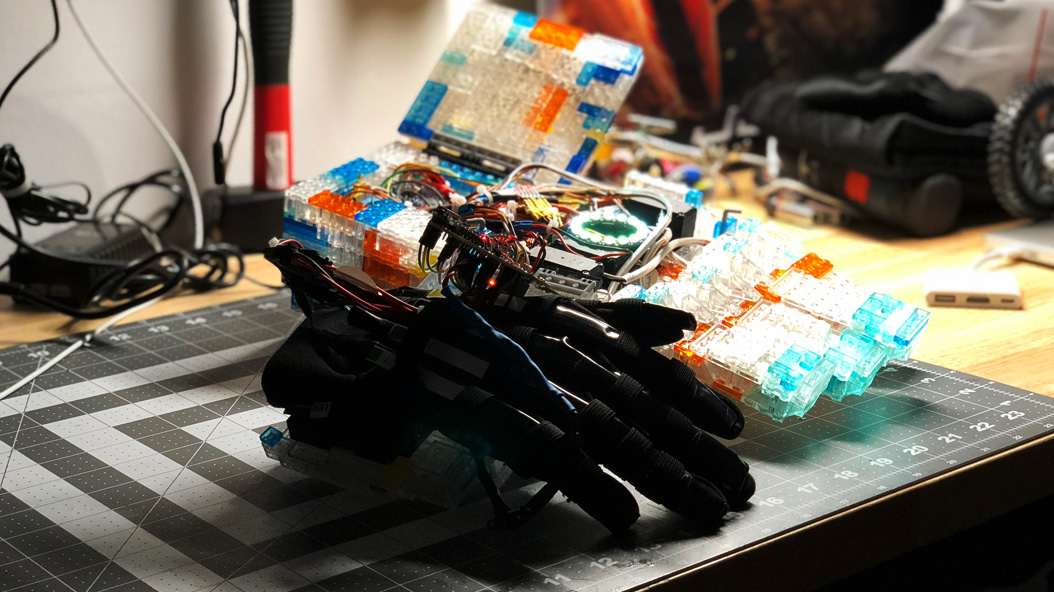
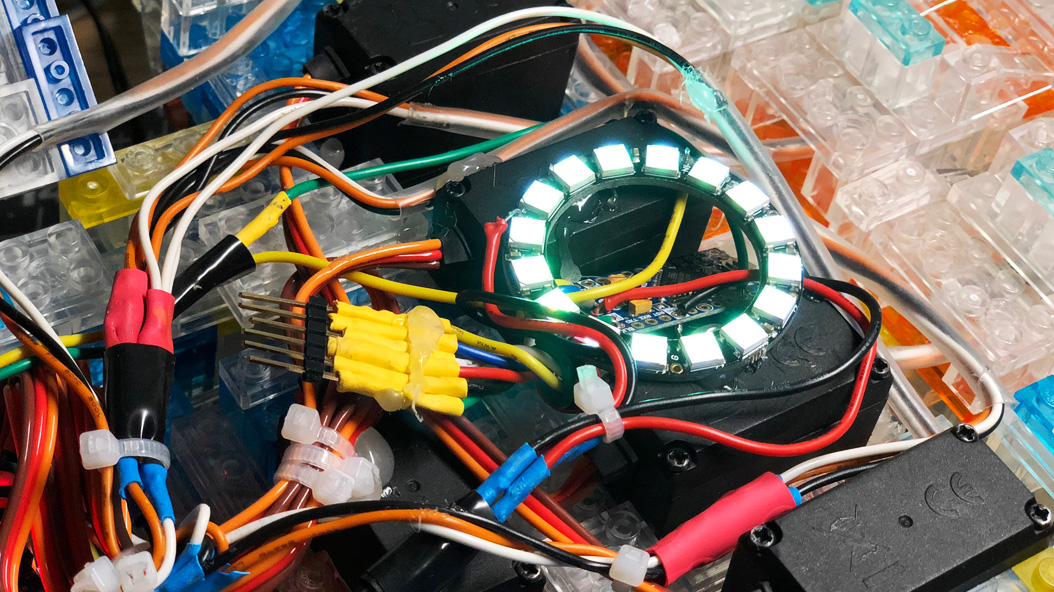
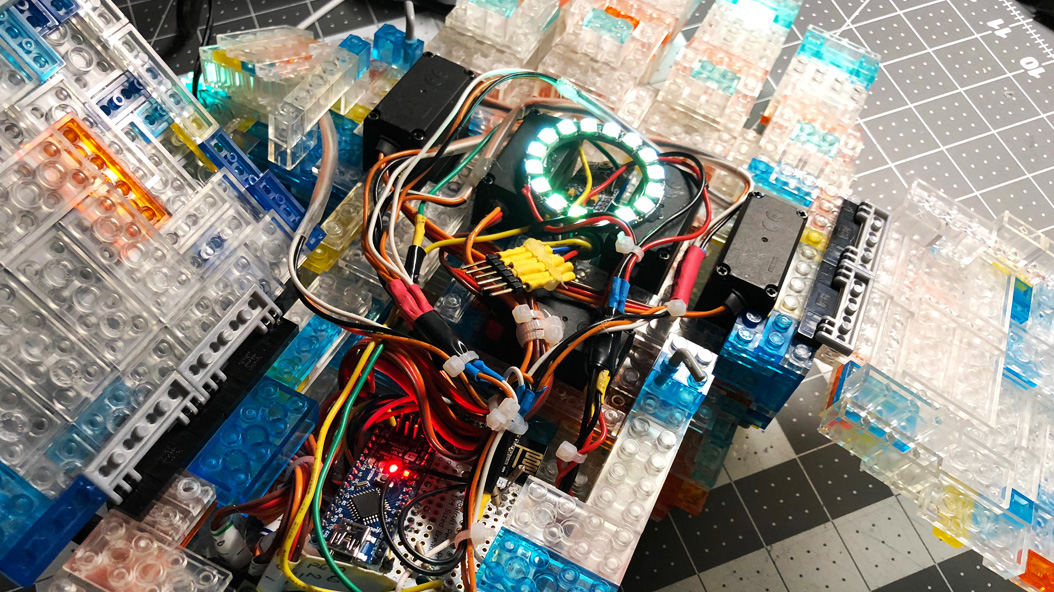
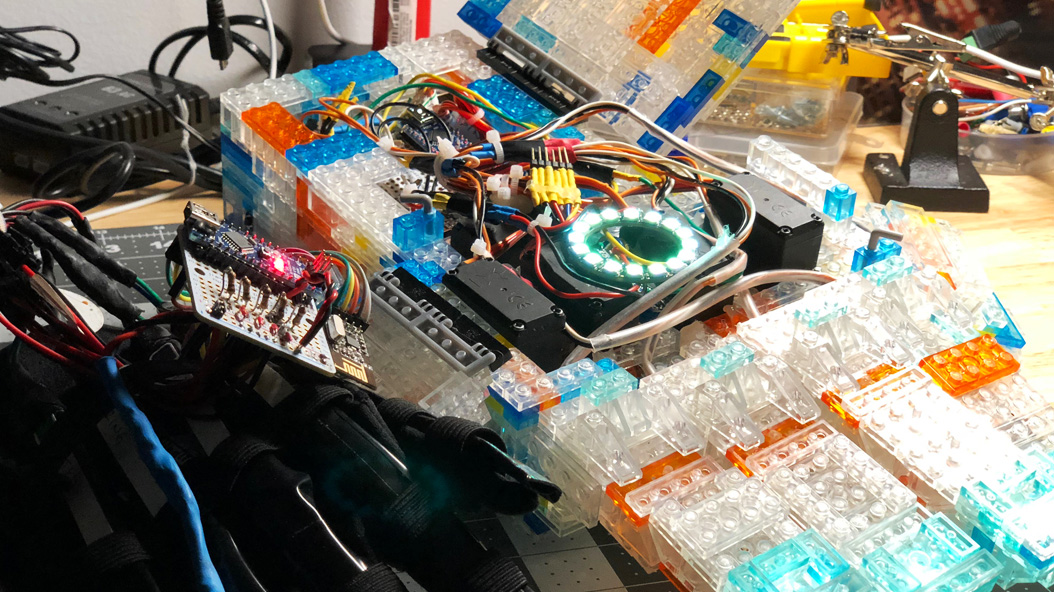
Diese Roboterhand ist mit Megabloks (Mikro) gebaut. Auf der Innenseite habe ich fünf Servos, die die Finger kräuseln. Die Servos sind mit einem Arduino-Nano-Chipsatz verbunden, der drahtlos von einem zweiten Nano-Chipsatz an Bord des Handschuhs über NRF-Module an jedem Ende angetrieben wird. Fünf Flexsensoren mit einer Länge von 4,5 Zoll sind an den Handschuhfingern befestigt. Auch in der Roboterhand befindet sich ein Neopixel-Ring und Neopixel-Lichter in den Fingerspitzen. Das System ist in C ++ codiert.

ETHERIUM RIG - 2018

ETHERIUM RIG - 2018

POKEBLOK APP

TURRENTBLOK GEMISCHTE REALITÄT APP - 2018

ROVER GEMISCHTE REALITÄT APP - 2018

SHAPESHIFTERS - 2018

MINIMALISTISCHES GEBÄUDE - 2020
-